Elastische Antriebe
Elastisch & Flexibel
Die Anordnung von kleinen und kleinsten Antriebseinheiten in Serie und prallel ahmt den Aufbau der Muskulator nach und erlaubt nicht nur die einfache "binäre" Ansteuerung jeder einzelnen Zelle, sondern auch die Kompensation des Ausfalls einzelner Zellen. Außerdem wird der Aufbau nachgiebig und weich - erpasst sichder Anwendung an. Am IMT experimentieren wir dazu mit kleinen Twisted-String-Aktoren.
- Da Souza S, Mühlbauer P, Janzen S, Liu J, Pott PP, Series and parallel actuation array of elastic micro-twisted string actuators, ETG/GMM-Fachtagung Innovative Klein- und Mikroantriebstechnik, 10.-11.09.2019, Würzburg
- Pott PP, Graefenstein H, Fischer J, Müller R, Schlaak HF, Abele E, Series Elastic Actuators for Man-Machine Cooperation, 9. ETG/GMM-Fachtagung "Innovative Klein- und Mikroantriebstechnik", 19.-20.09.2013, Nürnberg
- Pott PP, Beckerle Ph, Stewart KW, Design and Hardware Integration of Elastic Actuators for HMI, in Novel Bioinspired Actuator Designs for Robotics, Beckerle, Sharbafi, Vertraten, Pott, Seyfarth (eds), Springer 2020

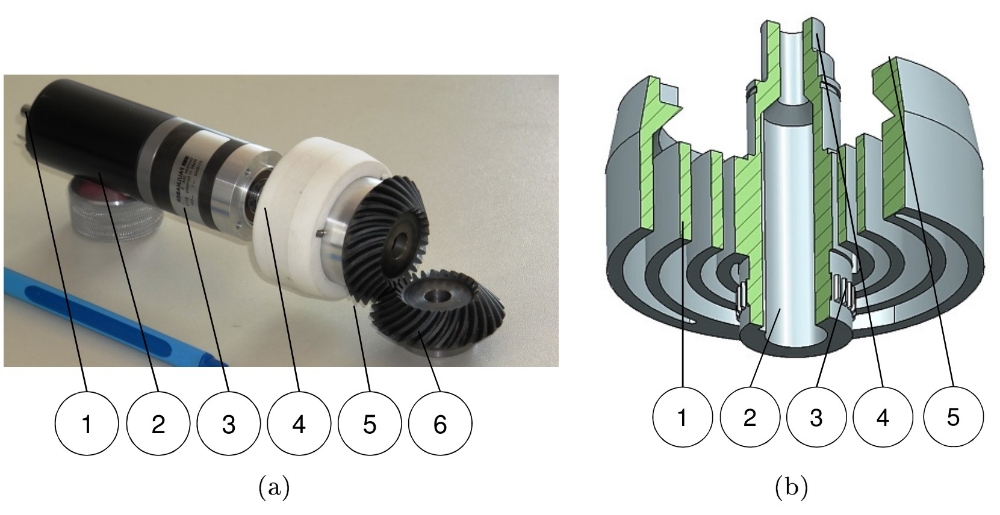
Seriell-Elastische Antriebe
Seriell- oder parallel-elastische Antriebe (SEA, PEA) sind sinnvoll, wenn es um Energieeffizienz, Regelbarkeit und Mensch-Maschine-Interaktion geht. Diese Antriebstopologie nutzt elastische Elemente im Drehmoment- oder Kraftfluss, der seriell, also direkt im Kraftfluss oder parallel dazu – um beispielsweise die Gewichtskraft zu kompensieren – angeordnet werden können.
Am IMT sollen Antriebe mit etwa 20 W Leistung und möglichst großer Frequenzbandbreite (bis 500 Hz) aufgebaut und charakterisiert werden. Dazu stehen Prüfstände und Messinfrastruktur zur Verfügung.