Objective

(a) Schematic: An elasticity introduced into the torque flow allows a simple zero force control. The torsion angle before and after the elasticity is measured. (b) shows a drive as installed in an active knee joint orthosis: (1) encoder on the motor shaft, (2) motor, (3) planetary gear, (4) coil spring, (5) second encoder, (6) angular gear, (7) output lever. [Müller R, Pott PP, Schlaak HF, Seriell-Elastische Aktoren als Antrieb für aktive Orthesen, AUTOMED Workshop, Aachen, 2012]
Image: Peter Pott
Serial or parallel elastic drives (SEA, PEA) are useful when energy efficiency, controllability and human-machine interaction are important. This drive topology uses elastic elements in the torque or force flow, which can be arranged serially, i.e. directly in the force flow, or parallel to it - for example to compensate for the weight force.
At the IMT, drives with about 20 W power and the widest possible frequency bandwidth (up to 500 Hz) are to be set up and characterised. Test benches and measurement infrastructure are available for this purpose.
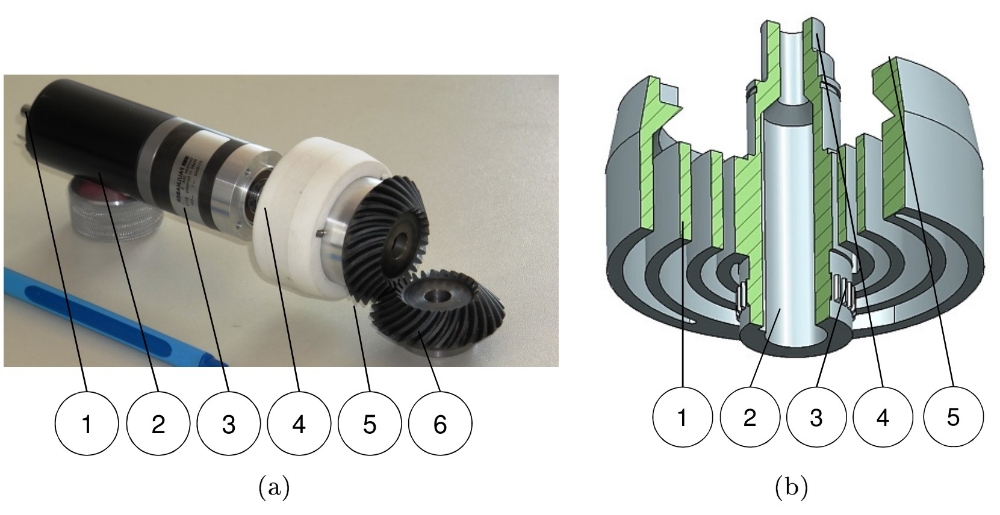
(a) shows a highly integrated SEA for a knee joint orthosis. Here the discrete serial spring is replaced by an additively manufactured one, which contains further functions such as the dimensional embodiment for the angle encoder and a mechanical stop: (1) no encoder needed on motor shaft, (2) motor, (3) planetary gear, (4) additively manufactured spiral spring, (5) gear serves as measuring embodiment for the second encoder, (6) angular gear. (b) shows the double-armed spiral spring (1), which is driven from the inside (2) and delivers the torque via the outer ring (5) to a bevel gear (not shown). A toothed structure on the input side serves as a dimensional embodiment for the magnetic sensor. An overwind protection is realised with the help of a cam on the output side (4). [Pott PP, Graefenstein H, Fischer J, Müller R, Schlaak HF, Abele E, Series Elastic Actuators for Man-Machine Cooperation, 9. ETG/GMM-Fachtagung Innovative Klein- und Mikroantriebstechnik, Nürnberg, 2013]
Image: Peter Pott