
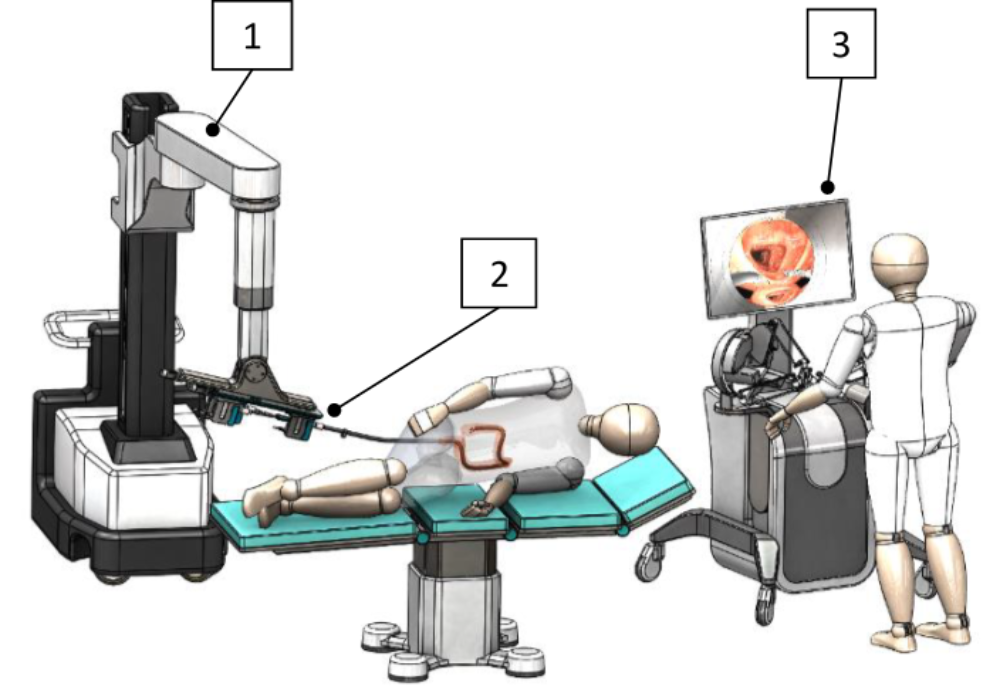
The majority of experimental flexible surgical robots described in literature are being developed for specific procedures involving a limited number of surgical instruments. A universal and in particular intuitive usability is thus not given. The aim of the project is therefore the development of a FLEXible MODular Endoscopic surgery robot (FLEXMODE-BOT) for minimally invasive surgery through natural orifices. The system consists of an initially flexible base-tube ("overtube"), shape-lockable in the situs, which carries the other instruments and sensors and is introduced into the patient, a powerful retraction module that allows manipulation of large organs with new actuation methods, a semi-autonomous subsystem for insertion of the system into the body, a compliant sensor module for detecting individual anatomy at insertion, a robotic arm maneuvering the entire device in the clinical environment, and a user interface.
Overall, the development of FLEXMODE-BOT will yield a variety of innovative technological solutions that will be applicable to a range of scientific fields and will open up additional commercialization opportunities.
The project is funded by the BMBF (FK 01D19002A) together with the following partners:
- KAIST (Daejeon, Korea): Development of the basic framework and a module for automated insertion into the patient's body: Development of the modular flexible shape-lockable overtube manipulator (WP1), drives for the insertion module (WP5a), system integration (WP6), and system test and validation (WP7).
- IMT (Stuttgart, DE): Development of drives and submodules for tissue retraction and acquisition of the curvature of the intestinal tract: development of actuators for the retractor (WP3), the soft tissue sensor (WP5b), system integration (WP6), and system test and validation (WP7)
- BEC GmbH (Pfullingen, DE): Development of the robotic arm as a stable basic platform for manipulating the entire system in the operating theatre: robotic positioning arm (WP4), system integration (WP6), and system test and validation (WP7)
- Ujintech (Daejeon, Korea): Development of the user interface for operation and control of the overall system and subcomponents: User interface and robot simulator (WP2), system integration (WP6) and system test and validation (WP7).
Tissue Sensor
A tissue sensor is designed to detect the individual anatomy of the colon and to prescribe the direction of movement of the endoscope. To capture the information of the curved course of the individual anatomy of the colon, a balloon is placed in the field of view of the camera via a working channel of the overtube. The air supply for the balloon, which is also the suspension, is provided by a flexible PUN-H tube. This allows the balloon to bend away from the bowel wall and follow the curved path of the bowel. Image processing can be used to detect the balloon and determine its position relative to the overtube. As the balloon is moved away from the intestinal wall, its position relative to the overtube also changes. Since the image center is known and the robotic overtube can be moved in x and y directions, it can follow the balloon.
{kind=link}
This novel system makes it possible to obtain information about the curved path of the intestine and integrate it into a larger robotic system. The HT is a robust but computationally expensive instrument to detect the balloon as a circle in the image. About five times a second, the information is provided where the balloon is in the image and where the overtube should move to.
Tissue Retractor
The tissue retractor with twisted string actuator was mounted on the robotic arm of the industrial partner BEC and a usability validation of the robot was performed in the experimental OR of the Institute of Medical Engineering. The instrument is divided into a passive and an active segment and can be classified as a pseudo-continuous discrete-joint robot. The active segment consists of 12 segmented joints in x-direction and 12 segmented joints in y-direction with a gripper at the tip. The lightweight and powerful actuators are designed to be attached to the positioning robot and can provide up to 328 N of traction force. This allows the tissue retractor to push liver tissue aside to create space for gallbladder surgery, for example.

Usability validation of the robot on a body phantom in the experimental OR of the Institute of Medical Device Technology.
Image: (c) Giuliano Giacoppo

The tissue retractor with the twisted string drives is mounted on the robot arm of the industrial partner BEC. The demonstrator is inserted into an intestinal phantom in the experimental operating room of the Institute of Medical Device Technology.
Image: (c) Giuliano Giacoppo
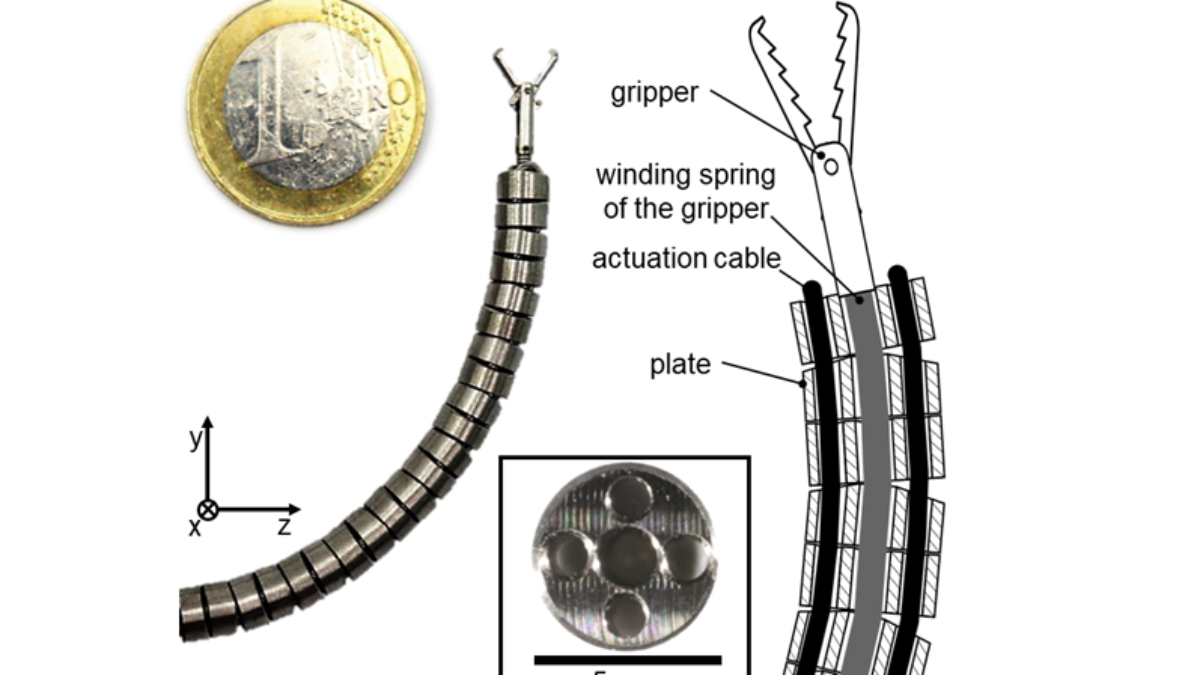
Active segment of the tissue retractor with segmented joints consisting of 25 titanium discs with 5 holes and the gripper at the tip.
Image: (c) Giuliano Giacoppo
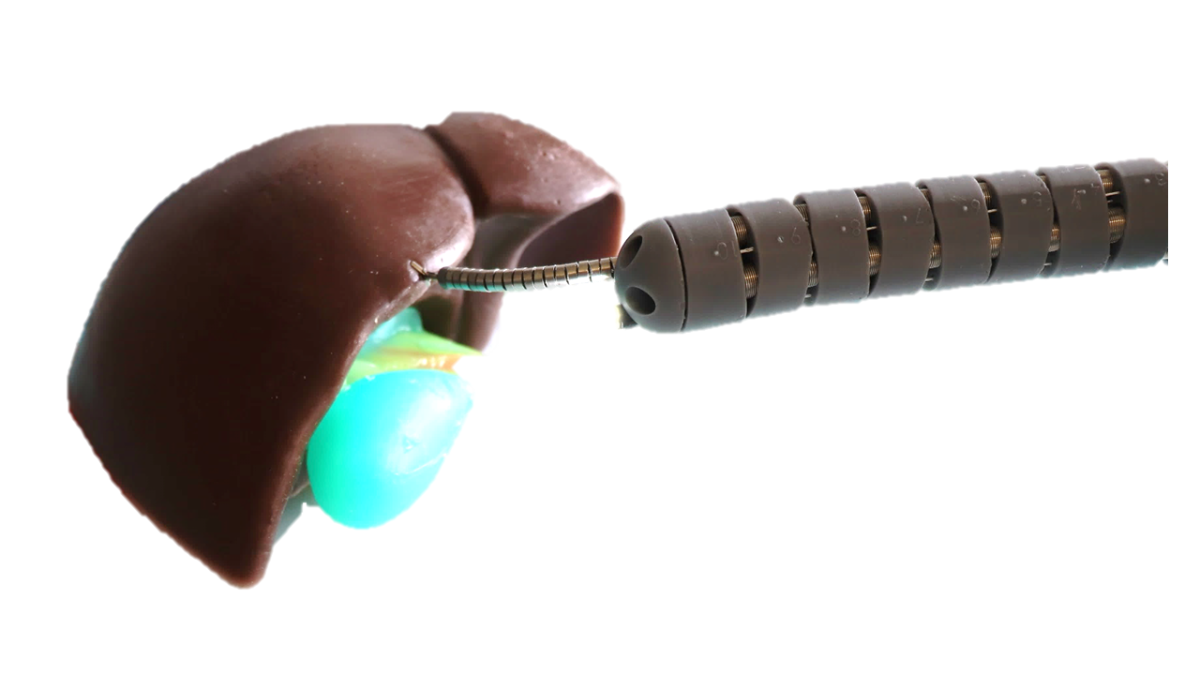
Tip of the FLEXible MODular Endoscopic Surgical Robot. The tissue retractor holds the liver model to the side to access the gallbladder.
Image: (c) Giuliano Giacoppo
Publications
- G. A. Giacoppo, M. B. Schäfer, und P. P. Pott, „Endurance Test Rig for Twisted String Actuators“, gehalten auf der IKMT 2022, Linz, Austria, 2022.
- G. A. Giacoppo, A. L. Bachmann, und P. P. Pott, „Antagonistic twisted string actuation for disposable flexible medical robots“, gehalten auf der IKMT 2022, Linz, Austria, 2022.
- A. L. Bachmann, G. A. Giacoppo, und P. P. Pott, „Work space analysis of a new instrument for Natural Orifice Transluminal Endoscopic Surgery (NOTES)“, Current Directions in Biomedical Engineering, Bd. 8, Nr. 2, Art. Nr. 2, 2022.
- G. A. Giacoppo, L. Schunter, und P. P. Pott, „Impact of the fiber cutting angle on fiber optic proximity sensors in endoscopy“, Current Directions in Biomedical Engineering, Bd. 8, Nr. 2, Art. Nr. 2, 2022.
- G. A. Giacoppo, J. Meiringer, M. B. Schäfer, J. Mayer, M. da Silva, L. Finke, und P. P. Pott, „Influence of a fixed twisting zone on Twisted String Actuation“, gehalten auf der ACTUATOR22, Mannheim, 2022.
- G. A. Giacoppo, A. L. Bachmann, und P. P. Pott, „A simple and powerful instrument for robotic flexible endoscopy“, in Proceedings of The 14th Hamlyn Symposium on Medical Robotics 2022, London, 2022, S. 13–14.
- D. Schlesiger, G. Giacoppo, M. B. Schäfer, und P. P. Pott, „Twisted string actuation with position feedback for robotic endoscopy“, Current Directions in Biomedical Engineering, 2021.
- G. Giacoppo, R. Mammel, und P. P. Pott, „Finding the curved pathway of the large intestine for robot-aided colonoscopy“, Current Directions in Biomedical Engineering, 2021.
- G. Giacoppo, A. Tzellou, J. Kim, H. Kim, D.-S. Kwon, K. Stewart, und P. Pott, „An optical colon contour tracking system for robot-aided colonoscopy Localization of a balloon in an image using Hough-Transformation“, In Bildverarbeitung für die Medizin 2021 (pp. 67-72). Springer Vieweg, Wiesbaden.

Peter P. Pott
Prof. Dr. rer. nat. habil.Head of the Institute

Giuliano Giacoppo
Dr.-Ing.Research assistant