The TRIPED project is running at Heidelberg University, Biomedical Engineering & Biorobotics group and deals with the construction and control of a three-legged walking robot. The robot was developed at IMT and can run up to 4 m/s, jump 1 m high and carry 50 kg. We are currently developing medical technology applications such as walking gait assistance.
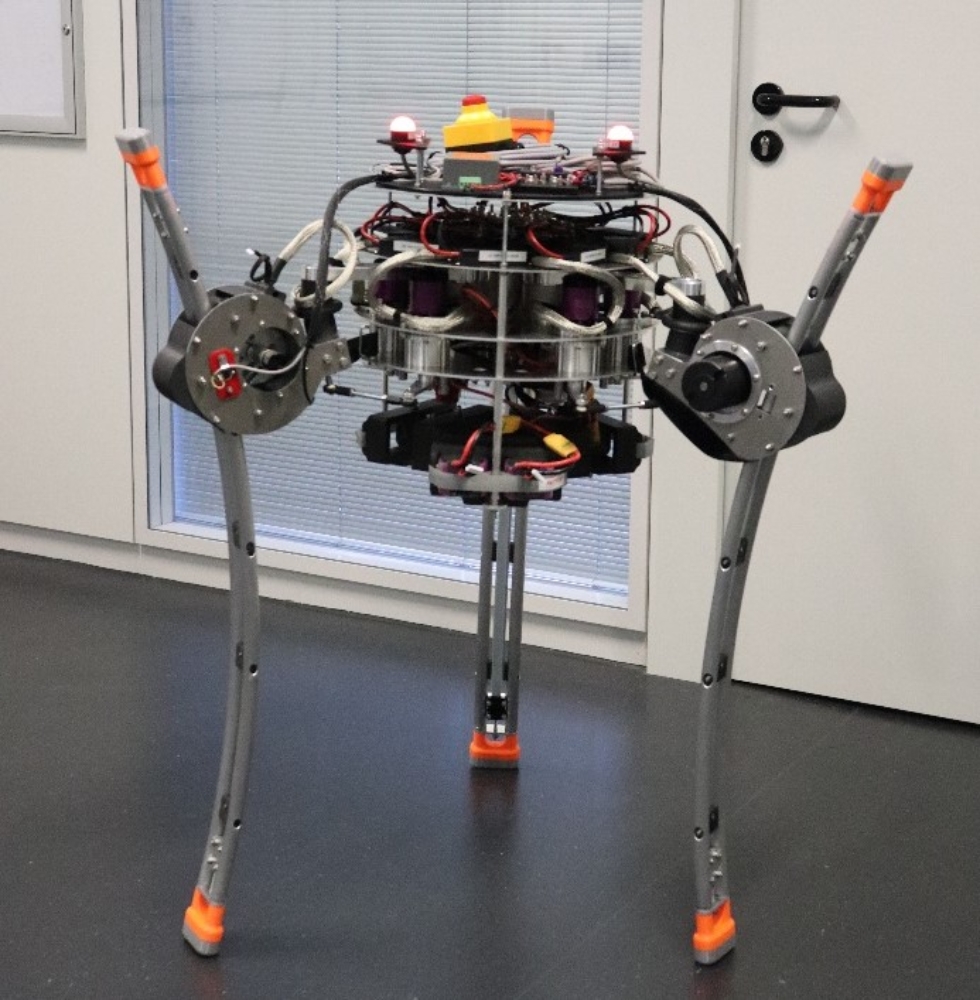
TRIPED
Photo: Peter Pott
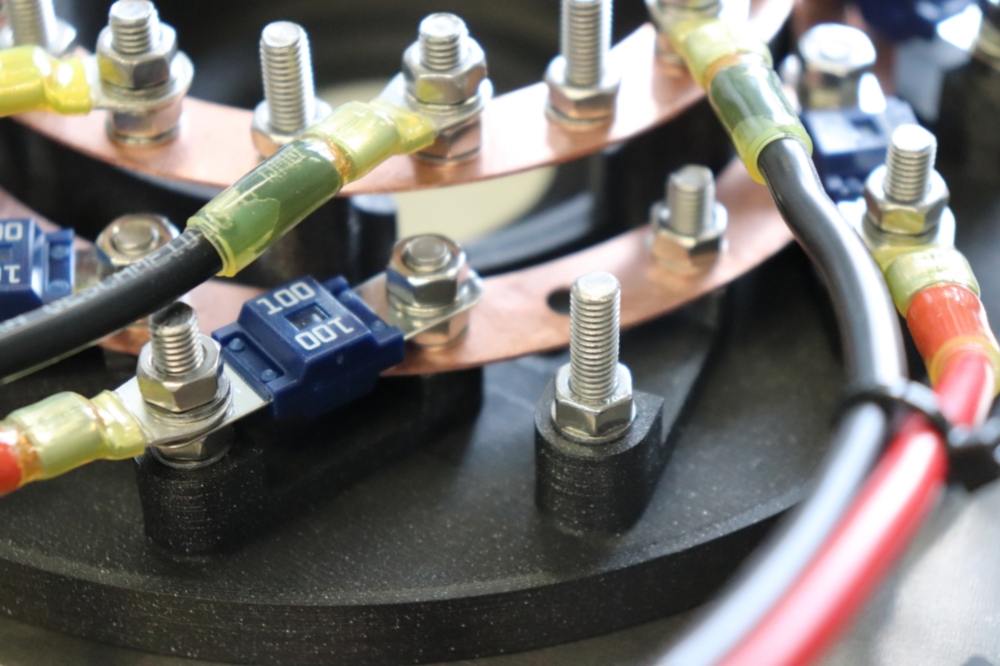
TRIPED electrical details
Photo: Johannes Bach
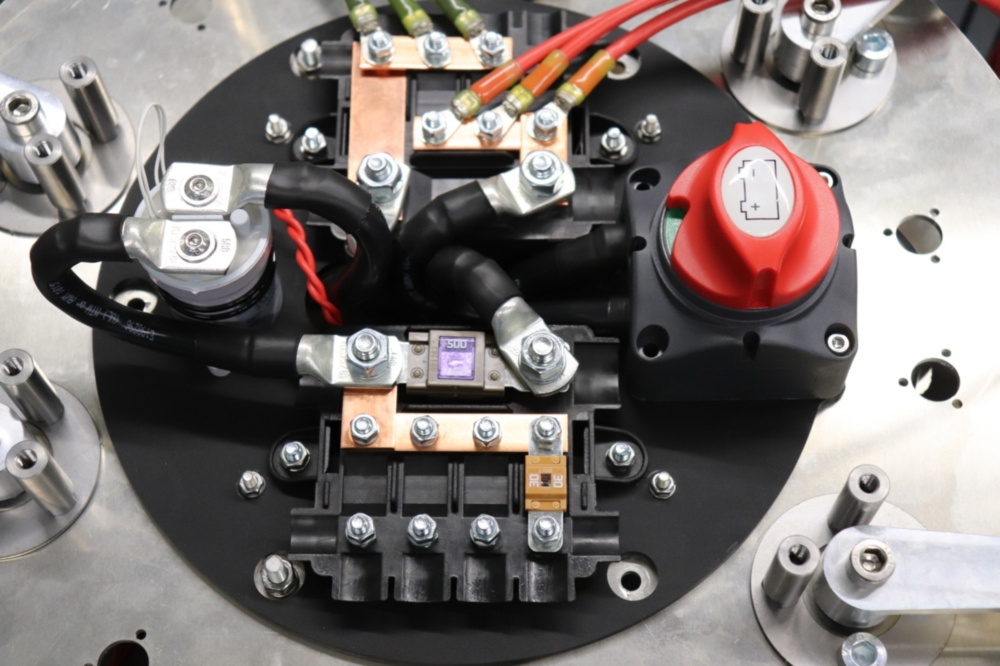
TRIPED electrical details 2
Photo: Johannes Bach
Partners
- Prof. Dr. Lorenzo Masia, Universität Heidelberg
- Prof. Dr. Essameddin Badreddin, Universität Heidelberg