Das Projekt TRIPED läuft an der Universität Heidelberg, Biomedical Engineering & Biorobotics group und beschäftigt sich mit dem Aufbau und der Regelung eines dreibeinigen Laufroboters. Der Roboter wurde am IMT entwickelt und kann bis zu 4 m/s schnell laufen, 1 m hoch springen und 50 kg tragen. Wir sind gerade dabei, medizintechnische Anwendungen wie zum Beispiel eine laufende Gangunterstützung zu entwickeln.
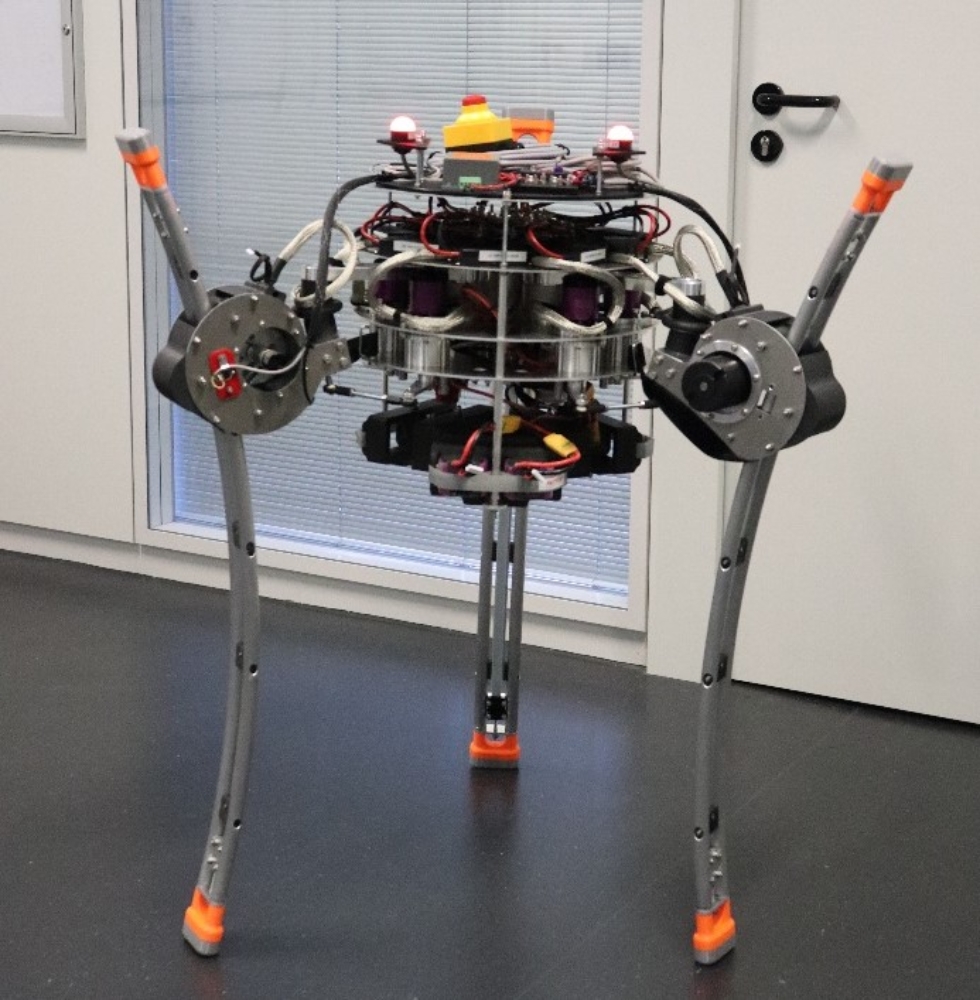
TRIPED
Bild: Peter Pott
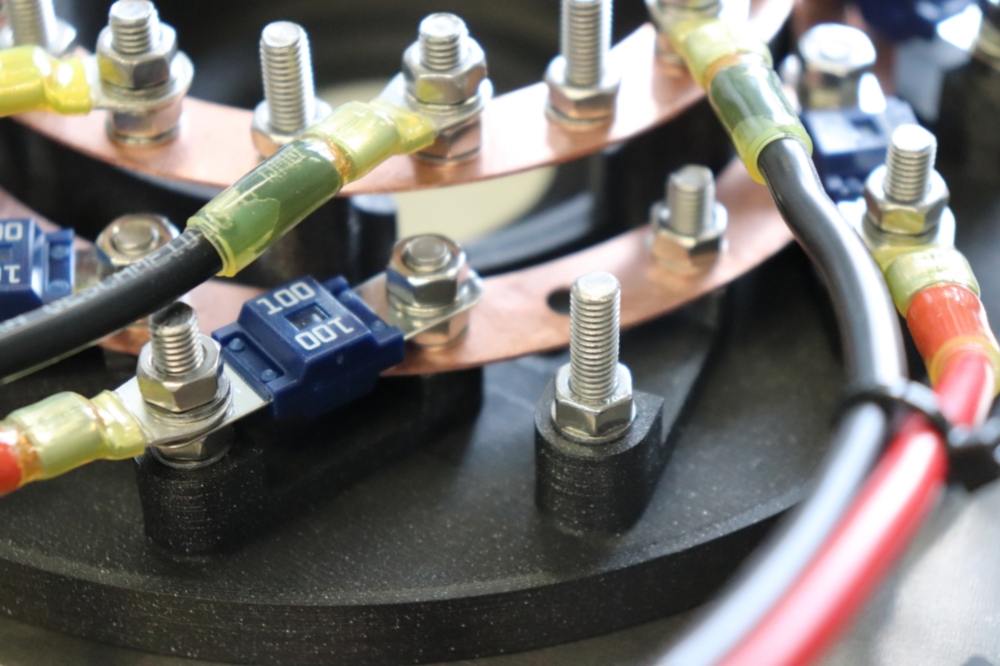
Elektrische Details des TRIPED
Bild: Johannes Bach
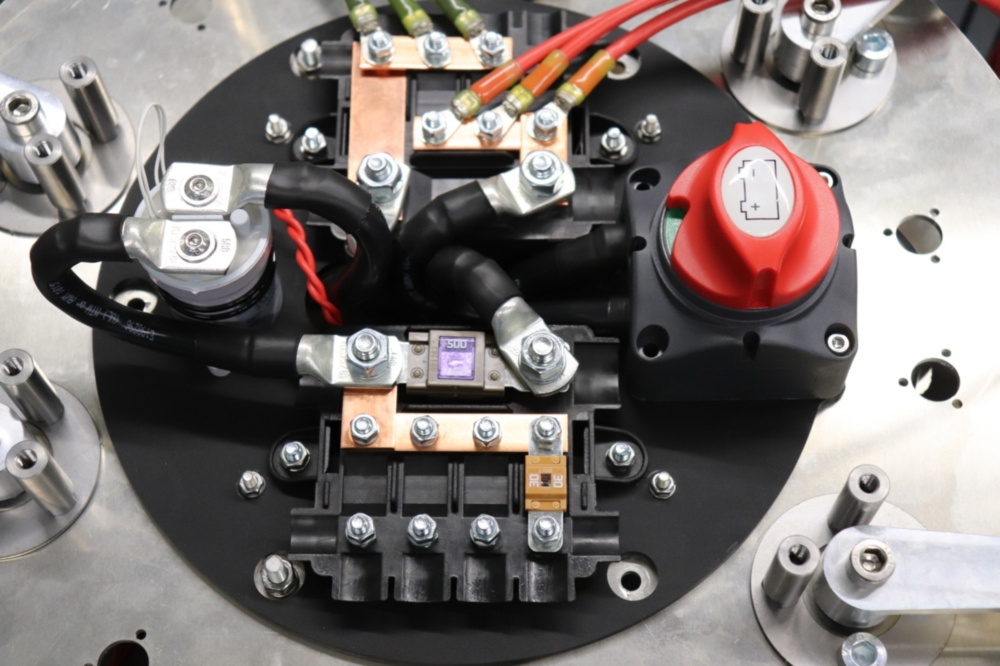
Elektrische Details des TRIPED
Bild: Johannes Bach
Ausgewählte Publikationen
- Baumgärtner J, Bach J, Masia L, Badreddin E, Pott PP, Highly dynamic robotic leg for non-biomimetic walking robots, ACTUATOR22, Mannheim, 28.-30.06.2022
Partner
- Prof. Dr. Lorenzo Masia, Universität Heidelberg
- Prof. Dr. Essameddin Badreddin, Universität Heidelberg