
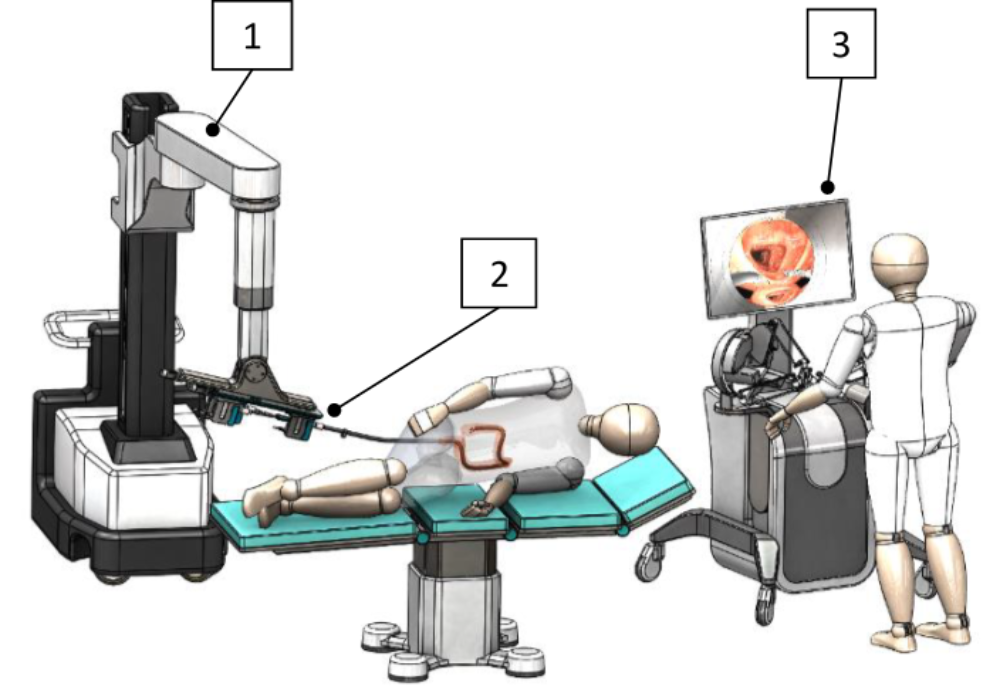
Die Mehrzahl der in der Literatur beschrieben experimentellen flexiblen chirurgischen Roboter wird für spezifische Verfahren mit einer begrenzten Anzahl von chirurgischen Instrumenten entwickelt. Eine universelle und insbesondere intuitive Einsetzbarkeit ist daher nicht gegeben. Ziel des Projekts ist somit die Entwicklung eines FLEXiblen MODularEn endoskopischen chirurgischen Roboters (FLEXMODE-BOT) für minimalinvasive Eingriffe durch natürliche Körperöffnungen. Das System besteht aus einem zunächst flexiblen am Situs jedoch hinsichtlich seiner Form verriegelbaren Basisschlauch ("Overtube"), der die weiteren Instrumente und Sensoren trägt und in den Patienten eingeführt wird, einem kraftvollen Retraktionsmodul, welches die Manipulation großer Organe mit neuen Betätigungsmethoden ermöglicht, einem teilautonomen Subsystem zur Insertion des Systems in den Körper, einem nachgiebigen Sensormodul zur Detektion der individuellen Anatomie bei der Insertion, einem Roboterarm, der das gesamte Gerät in der klinischen Umgebung manövriert sowie einer Benutzerschnittstelle.
Insgesamt wird die Entwicklung des FLEXMODE-BOT eine Vielzahl innovativer technologischenr Lösungen hervorbringen, die für eine Reihe von wissenschaftlichen Gebieten anwendbar sind und auch weitere Kommerzialisierungsmöglichkeiten eröffnen.
Das Vorhaben wird vom BMBF (FK 01D19002A) gefördert gemeinsam mit den folgenden Partnern voran getrieben:
- KAIST (Daejeon, Korea): Entwicklung des Grundgerüsts und eines Moduls zur automatisierten Insertion in den Körper des Patienten: Entwicklung des modular aufgebauten flexiblen formverriegelbaren Schlauchmanipulators (WP1), Antriebe für das Insertionsmodul (WP5a), Systemintegration (WP6) und Systemtest und Validierung (WP7)
- IMT (Stuttgart, DE) Entwicklung von Antrieben und Submodulen zur Gewebsretraktion und Erfassung der Kurvatur des Intestinaltrakts: Entwicklung von Antriebe für den Retraktor (WP3), der Gewebssensor (WP5b), Systemintegration (WP6) und Systemtest und Validierung (WP7)
- BEC GmbH (Pfullingen, DE): Entwicklung des Roboterarms als stabile Basisplattform zur Manipulation des Gesamtsystems im OP: Robotischer Positionierarm (WP4), Systemintegration (WP6) und Systemtest und Validierung (WP7)
- Ujintech (Daejeon, Korea): Entwicklung der Benutzerschnittstelle zur Bedienung und Steuerung des Gesamtsystems und der Teilkomponenten: Benutzerschnittstelle und Roboter-Simulator (WP2), Systemintegration (WP6) und Systemtest und Validierung (WP7)
Gewebesensor
Ein Gewebesensor soll die individuelle Anatomie des Dickdarms erfassen und die Bewegungsrichtung des Endoskops vorgeben. Um die Information des gekrümmten Verlaufs der individuellen Anatomie des Darms zu erfassen, wird ein Ballon über einen Arbeitskanal der Overtube im Sichtfeld der Kamera platziert. Die Luftzufuhr für den Ballon, welche gleichzeitig die Aufhängung ist, erfolgt mit einem flexiblen PUN-H Schlauch. Dadurch ist es möglich, dass der Ballon von der Darmwand weggebogen wird und den gekrümmten Verlauf des Darms folgt. Mit Hilfe der Bildverarbeitung kann der Ballon erkannt und seine Position relativ zur Overtube bestimmt werden. Wird der Ballon von der Darmwand wegbewegt, ändert sich auch die Position relativ zur Overtube. Da das Bildzentrum bekannt ist und die robotergestützte Overtube in x- und y-Richtungen bewegbar ist, kann diese dem Ballon folgen.
{kind=link}
Mit diesem neuartigen System ist es möglich Informationen über den gekrümmten Verlauf des Darms zu gewinnen und in ein größeres robotisches-System zu integrieren. Die HT ist ein robustes, aber rechenaufwendiges Instrument um den Ballon als Kreis im Bild zu erkennen. Etwa fünf Mal die Sekunde wird die Information bereitgestellt wo sich der Ballon im Bild befindet und wohin sich die Overtube hinbewegen soll.
Geweberetraktor
Der Geweberetraktor mit den Twisted String Antrieben wurde am Roboterarm des Industriepartners BEC montiert und eine Usability Validierung des Roboters im Experimental-OP des Instituts für Medizintechnik durchgeführt. Das Instrument ist in ein passives und ein aktives Segment unterteilt und kann als pseudokontinuierlicher diskreter Gelenkroboter klassifiziert werden. Das aktive Segment besteht aus 12 segmentierten Gelenken in x-Richtung und 12 segmentierten Gelenken in y-Richtung mit einem Greifer an der Spitze. Die leichten und leistungsstarken Aktoren sind so konstruiert, dass sie am Positionierroboter befestigt werden können und eine Zugkraft von bis zu 328 N ausüben können. Damit kann der Geweberetraktor Lebergewebe zur Seite schieben, um ausreichend Platz für z.B. eine Gallenblasenoperation zu schaffen

Usability-Validierung des Roboters an ein Körperphantom im Experimental-OP des Instituts für Medizingerätetechnik.
Bild: (c) Giuliano Giacoppo

Der Geweberetraktor mit den Twisted String Antrieben ist am Roboterarm des Industriepartners BEC montiert. Der Demonstrator ist in ein Darmphantom im Experimental-OP des Instituts für Medizingerätetechnik eingeführt.
Bild: (c) Giuliano Giacoppo
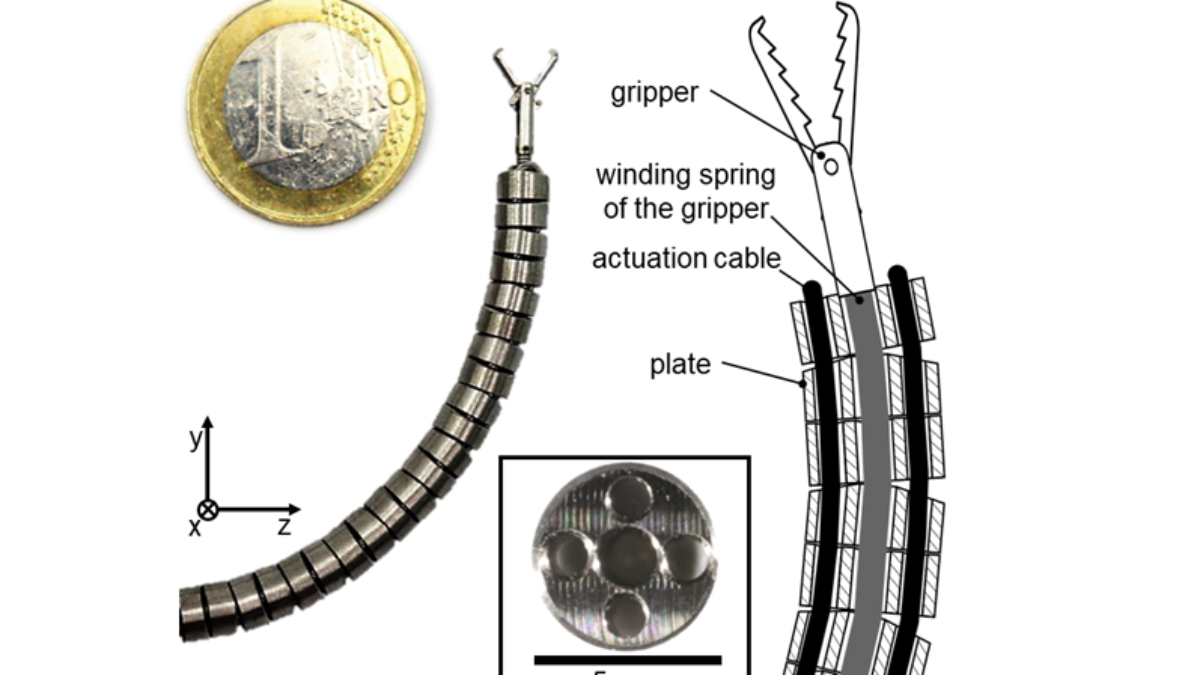
Aktives Segment des Geweberetraktor mit segmentierten Gelenken bestehend aus 25 Titanscheiben mit 5 Bohrungen und dem Greifer an der Spitze.
Bild: (c) Giuliano Giacoppo
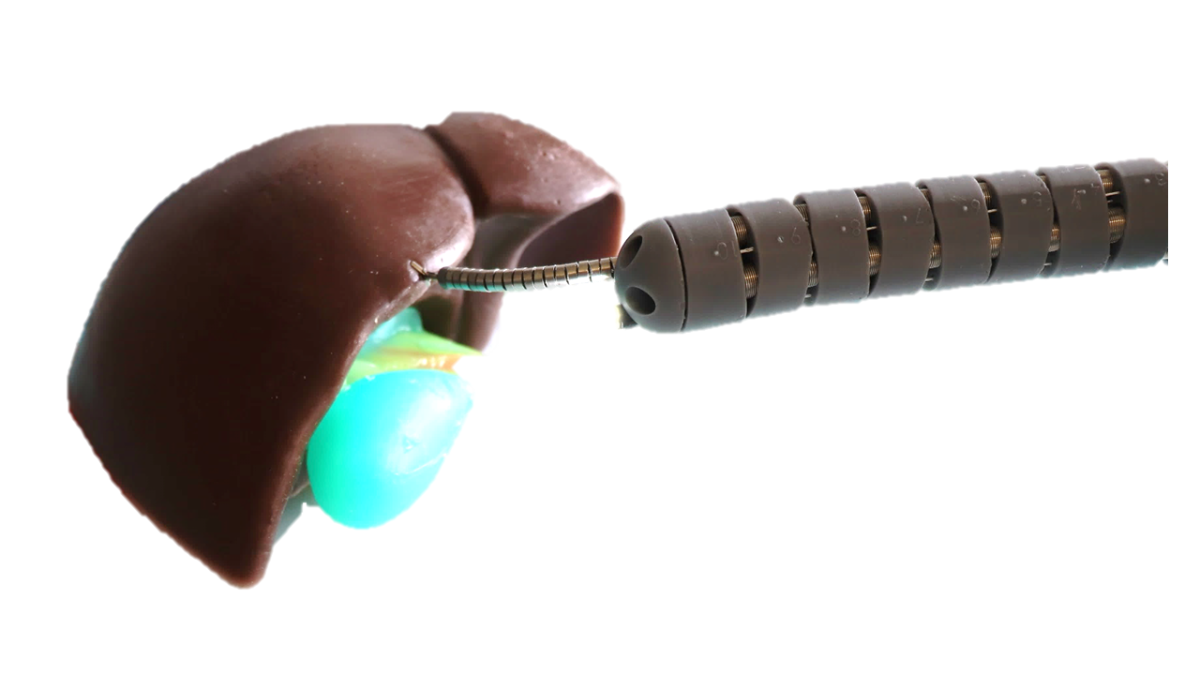
Spitze des FLEXibler MODularer endoskopischer chirurgischer Roboter. Der Geweberetraktor hält das Lebermodell zur Seite, um die Gallenblase zugänglich zu machen.
Bild: (c) Giuliano Giacoppo
Ausgewählte Publikationen
- Giacoppo GA, Pott PP, Autonomy and Use of Flexible Endoscopy Robots in Gastroenterology – A Review, 58th Annual Conference of the German Society for Biomedical Engineering, Stuttgart, 18.-20.09.2024
- Fratarcangeli E, Govoni A, Giacoppo GA, Heinrich L, Meattini R, Pott PP, Palli G, Additively Manufactured Flexible Endoscope Driven By Guided Antagonistic Twisted String Actuation: A Pilot Experimental Evaluation, 2024 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Boston, MA, 15.-18.07.2024
- Giacoppo GA, Öztürk S, Pott PP, Integrated Force Sensing Technology for Twisted String Actuation Using Conductive Yarns, ACTUATOR 24, Wiesbaden, 13.-14.06.2024
- Giacoppo GA, Ohmann J, Youssef A, Reetz CM, Heinrich L, Pott PP, High Dexterity Single Use Flexible Endoscopic Robot, Hamlyn Symposium on Medical Robotics 2024, 25.-28.06.2024, London
- Giacoppo GA, Schulze E, Pott PP, Hyper-redundant endoscopic manipulator position compensation under external load, CURAC 2023, Basel, 24.-26.08.2023
- Giacoppo GA, Mayer J, Hartmann J, Bachmann AL, Pott PP, Actively shielded capacitive proximity sensor for endoscopy, 57th DGBMT Annual Conference on Biomedical Engineering (BMT 2023), 26.-28.09.2023, Rhein-Ruhr
- Bachmann A, Giacoppo GA, Pott PP, Work Space Analysis of a New Instrument for Natural Orifice Transluminal Endoscopic Surgery (NOTES), BMT Dreiländer-Tagung, 28.-30.09.2022, Innsbruck
- Giacoppo GA, Bachmann AL, Pott PP, Antagonistic twisted string actuation for disposable flexible medical robots, ETG/GMM-Fachtagung Innovative Klein- und Mikroantriebstechnik, IKMT 2022, 14.-15.09.2022, Linz
- Giacoppo GA, Schäfer MB, Pott PP, Endurance Test Rig for Twisted String Actuators, ETG/GMM-Fachtagung Innovative Klein- und Mikroantriebstechnik, IKMT 2022, 14.-15.09.2022, Linz
- Giacoppo GA, Schunter L, Pott PP, Impact of the fiber cutting angle on fiber optic proximity sensors in endoscopy, BMT Dreiländer-Tagung, 28.-30.09.2022, Innsbruck
- Giacoppo GA, Bachmann AL, Pott PP, A simple and powerful instrument for robotic flexible endoscopy, 14th Hamlyn Symposium on Medical Robotics - HSMR2022, London, 26.-29.06.2022
- Giacoppo GA, Mammel R, Pott PP, Finding the curved pathway of an intestine for robot-aided colonoscopy, 55. DGBMT Jahrestagung, 05.10.-07.10.2021, Hannover
- Giacoppo G, Tzellou A, Kim J, Kim H, Kwon D-S, Stewart KW, Pott PP, An optical colon contour tracking system for robot-aided colonoscopy Localization of a balloon in an image using Hough-Transformation, Workshop Bildverarbeitung für die Medizin, 7.-9.3.2021 OTH Regensburg
Publikationen
- L. Heisterberg, D. Wichmann, Th. Maier, L. Manfredi, P.P. Pott, Design and Evaluation of New User Input Devices for Improved Ergonomics in Flexible Robotic Endoscopy, Frontiers in Robotics and AI, 12, DOI 10.3389/frobt.2025.1559574, 2025
- G. A. Giacoppo, M. B. Schäfer, und P. P. Pott, „Endurance Test Rig for Twisted String Actuators“, gehalten auf der IKMT 2022, Linz, Austria, 2022.
- G. A. Giacoppo, A. L. Bachmann, und P. P. Pott, „Antagonistic twisted string actuation for disposable flexible medical robots“, gehalten auf der IKMT 2022, Linz, Austria, 2022.
- A. L. Bachmann, G. A. Giacoppo, und P. P. Pott, „Work space analysis of a new instrument for Natural Orifice Transluminal Endoscopic Surgery (NOTES)“, Current Directions in Biomedical Engineering, Bd. 8, Nr. 2, Art. Nr. 2, 2022.
- G. A. Giacoppo, L. Schunter, und P. P. Pott, „Impact of the fiber cutting angle on fiber optic proximity sensors in endoscopy“, Current Directions in Biomedical Engineering, Bd. 8, Nr. 2, Art. Nr. 2, 2022.
- G. A. Giacoppo, J. Meiringer, M. B. Schäfer, J. Mayer, M. da Silva, L. Finke, und P. P. Pott, „Influence of a fixed twisting zone on Twisted String Actuation“, gehalten auf der ACTUATOR22, Mannheim, 2022.
- G. A. Giacoppo, A. L. Bachmann, und P. P. Pott, „A simple and powerful instrument for robotic flexible endoscopy“, in Proceedings of The 14th Hamlyn Symposium on Medical Robotics 2022, London, 2022, S. 13–14.
- D. Schlesiger, G. Giacoppo, M. B. Schäfer, und P. P. Pott, „Twisted string actuation with position feedback for robotic endoscopy“, Current Directions in Biomedical Engineering, 2021.
- G. Giacoppo, R. Mammel, und P. P. Pott, „Finding the curved pathway of the large intestine for robot-aided colonoscopy“, Current Directions in Biomedical Engineering, 2021.
- G. Giacoppo, A. Tzellou, J. Kim, H. Kim, D.-S. Kwon, K. Stewart, und P. Pott, „An optical colon contour tracking system for robot-aided colonoscopy Localization of a balloon in an image using Hough-Transformation“, In Bildverarbeitung für die Medizin 2021 (pp. 67-72). Springer Vieweg, Wiesbaden.

Peter P. Pott
Prof. Dr. rer. nat. habil.Institutsleitung